コントローラとHILSとの接続(1)
受託開発実績:コントローラとHILSとの接続(1)
モーターコントローラとHILSシステムとの接続アダプタを作成させていただきました。
導入前の問題点
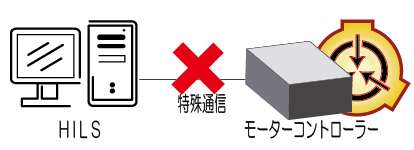
お客様の開発対象は、モーターコントローラーを制御するECUの開発でした。外部環境に応じてモーターコントローラーを適切に制御するのが目的です。
しかし、その制御アルゴリズムをC言語で書き、ECUに載せてテストするのは少し手間のかかる仕事でした。
そこで、たまたまお持ちだったHILSを使ってラピッドプロトタイピングを行う事を検討されました。(車載ではなくラボの中で実験出来るため、MicroAutoBoxのようなシステムは必要ありませんでした)
しかし、モーターコントローラーは特殊な通信プロトコルで動いているため、HILSと繋げる事が出来ませんでした。
ソリューション
お客様から、モーターコントローラーの通信プロトコル仕様をいただき、それをベースにアダプタを作成させていただきました。
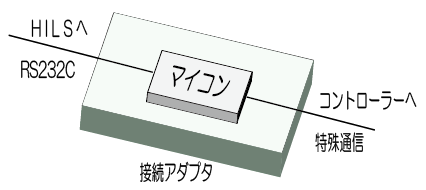
特長は、次の通りです。
■アダプタとHILSとはシリアル通信を行う
■アダプタとモーターコントローラーとは、独自通信を行う
■HILSで使えるドライバーブロックを用意させていただき、そのブロックを使用してモーターコントローラーに指示出来るようにしました
通信プロトコル自体は複雑なものではありませんでした。しかし、ローカル通信の仕様書によくある曖昧性などがあり、検証に少し工夫が必要でした。